Helicopter flight control systems enable the pilot to control lift, attitude, direction, and engine power throughout all phases of flight. These systems work together through a combination of mechanical linkages, hydraulic components, and rotor-control mechanisms to provide precise control of the aircraft. The primary controls include the collective pitch control, cyclic pitch control, antitorque pedals, and throttle. The collective and cyclic controls operate through the swash plate assembly to vary main rotor blade pitch.
Swash Plate Assembly
The purpose of the swash plate is to transmit control inputs from the collective and cyclic controls to the main rotor blades. It consists of two main parts: the stationary swash plate and the rotating swash plate. [Figure 1]
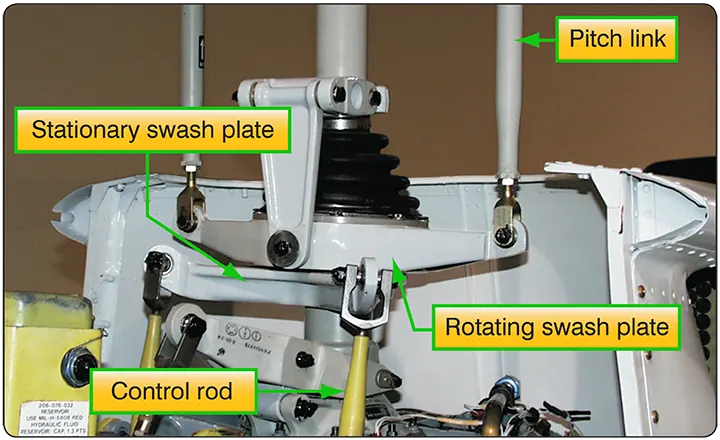 |
| Figure 1. Stationary and rotating swash plate |
The stationary swash plate is mounted around the main rotor mast and connected to the cyclic and collective controls by a series of pushrods. It is restrained from rotating by an antidrive link but is able to tilt in all directions and move vertically. The rotating swash plate is mounted to the stationary swash plate by a uniball sleeve. It is connected to the mast by drive links and is allowed to rotate with the main rotor mast. Both swash plates tilt and slide up and down as one unit. The rotating swash plate is connected to the pitch horns by the pitch links.
There are three major controls in a helicopter that the pilot must use during flight. They are the collective pitch control, cyclic pitch control, and antitorque pedals or tail rotor control. In addition to these major controls, the pilot must also use the throttle control, which is mounted directly to the collective pitch control in order to fly the helicopter.
Collective Pitch Control
The collective pitch control is located on the left side of the pilot’s seat and is operated with the left hand. The collective is used to make changes to the pitch angle of all the main rotor blades simultaneously, or collectively, as the name implies. As the collective pitch control is raised, there is a simultaneous and equal increase in the pitch angle of all main rotor blades; as it is lowered, there is a simultaneous and equal decrease in pitch angle. [Figure 2]
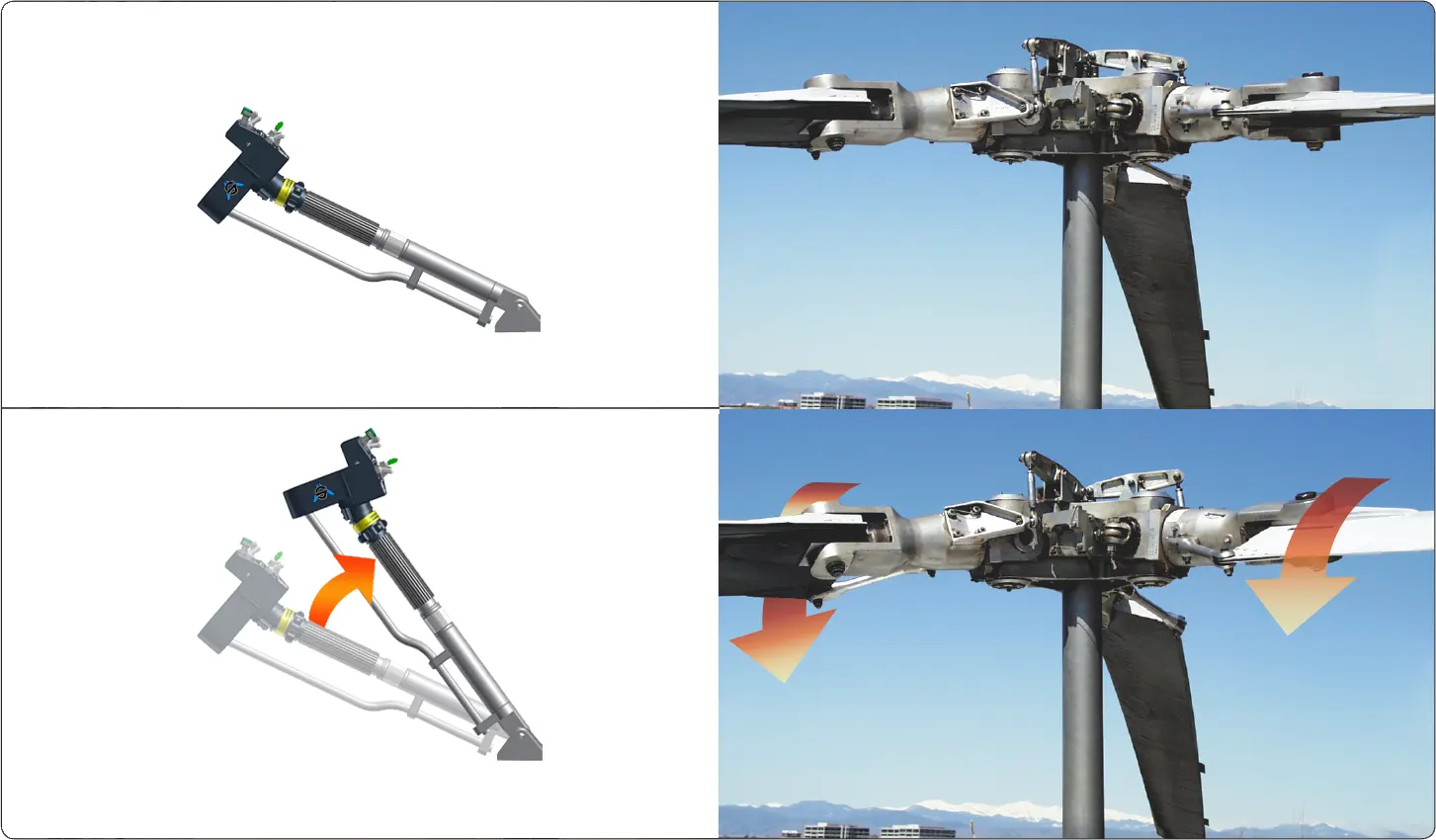 |
| Figure 2. Raising the collective pitch control increases the pitch angle by the same amount on all blades |
This is done through a series of mechanical linkages, and the amount of movement in the collective lever determines the amount of blade pitch change. An adjustable friction control helps prevent inadvertent collective pitch movement.
Throttle Control
The function of the throttle is to regulate engine rpm. If the correlator or governor system does not maintain the desired rpm when the collective is raised or lowered, or if those systems are not installed, the throttle must be moved manually with the twist grip to maintain rpm. The throttle control is much like a motorcycle throttle, and works almost the same way; twisting the throttle to the left increases rpm, twisting the throttle to the right decreases rpm. [Figure 3]
 |
| Figure 3. A twist grip throttle is usually mounted on the end of the collective lever. The throttles on some turbine helicopters are mounted on the overhead panel or on the floor in the cockpit |
Governor/Correlator
A governor is a sensing device that senses rotor and engine rpm and makes the necessary adjustments in order to keep rotor rpm constant. Once the rotor rpm is set in normal operations, the governor keeps the rpm constant, and there is no need to make any throttle adjustments. Governors are common on all turbine helicopters (as a function of the turbine engine fuel control system) and are used on some piston-powered helicopters.
A correlator is a mechanical connection between the collective lever and the engine throttle. When the collective lever is raised, power is automatically increased, and when it is lowered, power is decreased. This system maintains rpm close to the desired value, but still requires adjustment of the throttle for fine tuning.
Some helicopters do not have correlators or governors and require coordination of all collective and throttle movements. When the collective is raised, the throttle must be increased; when the collective is lowered, the throttle must be decreased. As with any aircraft control, large adjustments of either collective pitch or throttle should be avoided. All corrections should be made with smooth pressure.
In piston helicopters, the collective pitch is the primary control for manifold pressure, and the throttle is the primary control for rpm. However, the collective pitch control also influences rpm, and the throttle also influences manifold pressure; therefore, each is considered to be a secondary control of the other’s function. Both the tachometer (rpm indicator) and the manifold pressure gauge must be analyzed to determine which control to use. Figure 4 illustrates this relationship.
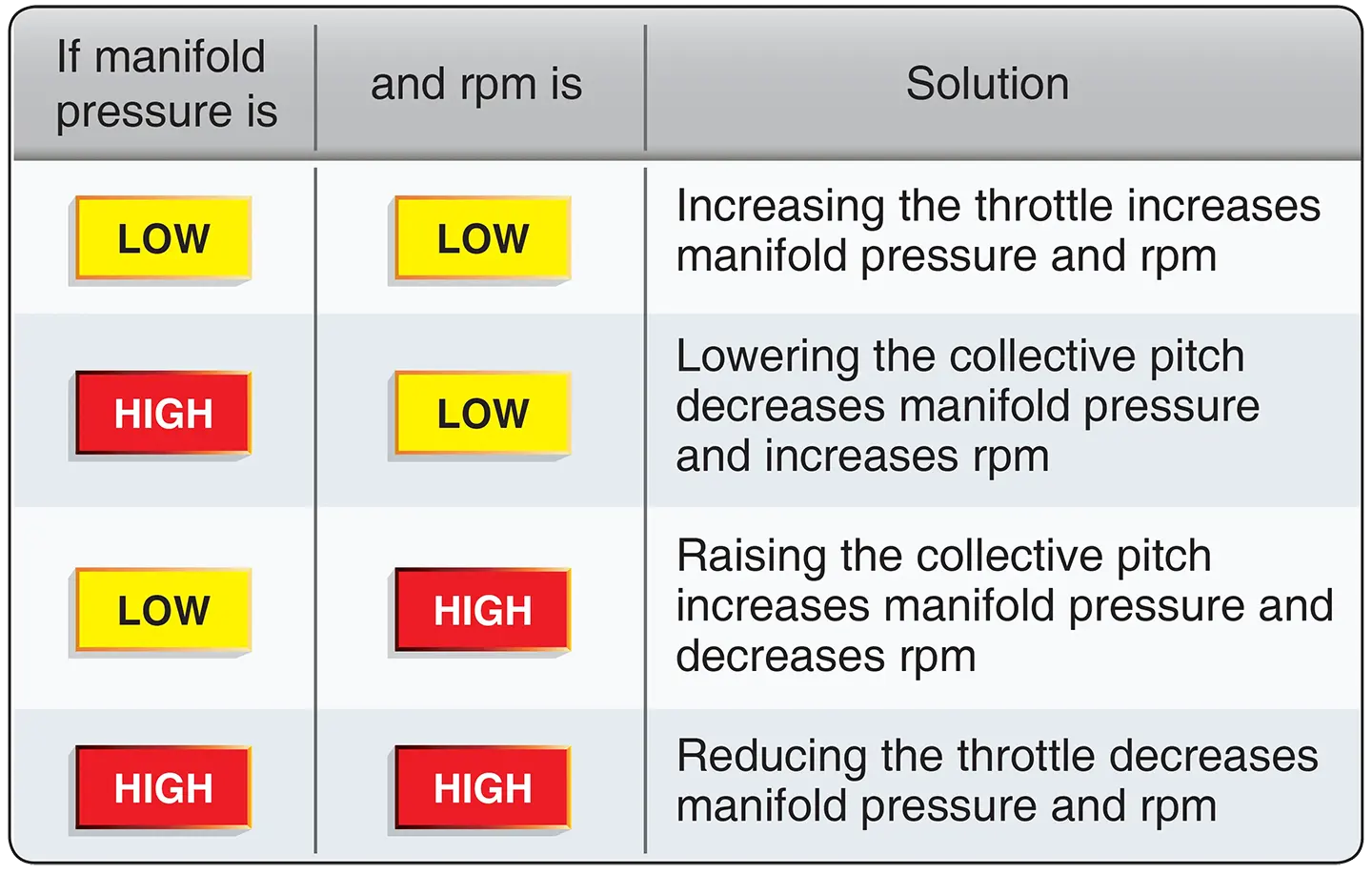 |
| Figure 4. Relationship between manifold pressure, rpm, collective, and throttle |
Cyclic Pitch Control
The cyclic pitch control is mounted vertically from the flight deck floor, between the pilot’s legs or, in some models, between the two pilot seats. [Figure 5]
 |
| Figure 5. The cyclic pitch control may be mounted vertically between the pilot’s knees or on a teetering bar from a single cyclic located in the center of the helicopter. The cyclic can pivot in all directions |
This primary flight control allows the pilot to fly the helicopter in any horizontal direction; fore, aft, and sideways. The total lift force is always perpendicular to the tip-path plane of the main rotor. The purpose of the cyclic pitch control is to tilt the tip-path plane in the desired direction of flight. The cyclic control changes the direction of this force and controls the attitude and airspeed of the helicopter.
The rotor disc tilts in the same direction the cyclic pitch control is moved. If the cyclic is moved forward, the rotor disc tilts forward; if the cyclic is moved aft, the disc tilts aft, and so on. Because the rotor disc acts like a gyro, the mechanical linkages for the cyclic control rods are rigged in such a way that they decrease the pitch angle of the rotor blade approximately 90° before it reaches the direction of cyclic displacement, and increase the pitch angle of the rotor blade approximately 90° after it passes the direction of displacement.
An increase in pitch angle increases AOA; a decrease in pitch angle decreases AOA. For example, if the cyclic is moved forward, the AOA decreases as the rotor blade passes the right side of the helicopter and increases on the left side. This results in maximum downward deflection of the rotor blade in front of the helicopter and maximum upward deflection behind it, causing the rotor disc to tilt forward.
Antitorque Pedals
The antitorque pedals are located on the cabin floor by the pilot’s feet. They control the pitch and, therefore, the thrust of the tail rotor blades. [Figure 6]
 |
| Figure 6. Antitorque pedals compensate for changes in torque and control heading in a hover |
Newton’s third law explains why the helicopter fuselage tends to rotate in the opposite direction of the main rotor blades unless this torque is counteracted and controlled. To make flight possible and to compensate for this torque, most helicopter designs incorporate an antitorque rotor or tail rotor.
The antitorque pedals allow the pilot to control the pitch angle of the tail rotor blades, which helps maintain longitudinal trim in forward flight and enables the pilot to turn the helicopter while hovering. The antitorque pedals are connected to the pitch change mechanism on the tail rotor gearbox and allow the pitch angle on the tail rotor blades to be increased or decreased.
Helicopters that are designed with tandem rotors do not have an antitorque rotor. These helicopters are designed with both rotor systems rotating in opposite directions to counteract the torque, rather than using a tail rotor.
Directional antitorque pedals are used for directional control of the aircraft while in flight, as well as while taxiing with the forward gear off the ground. With the right pedal displaced forward, the forward rotor disc tilts to the right, while the aft rotor disc tilts to the left. The opposite occurs when the left pedal is pushed forward; the forward rotor disc inclines to the left, and the aft rotor disc tilts to the right. Different combinations of pedal and cyclic inputs allow a tandem-rotor helicopter to pivot about the forward or aft vertical axis, as well as about its center of mass.